
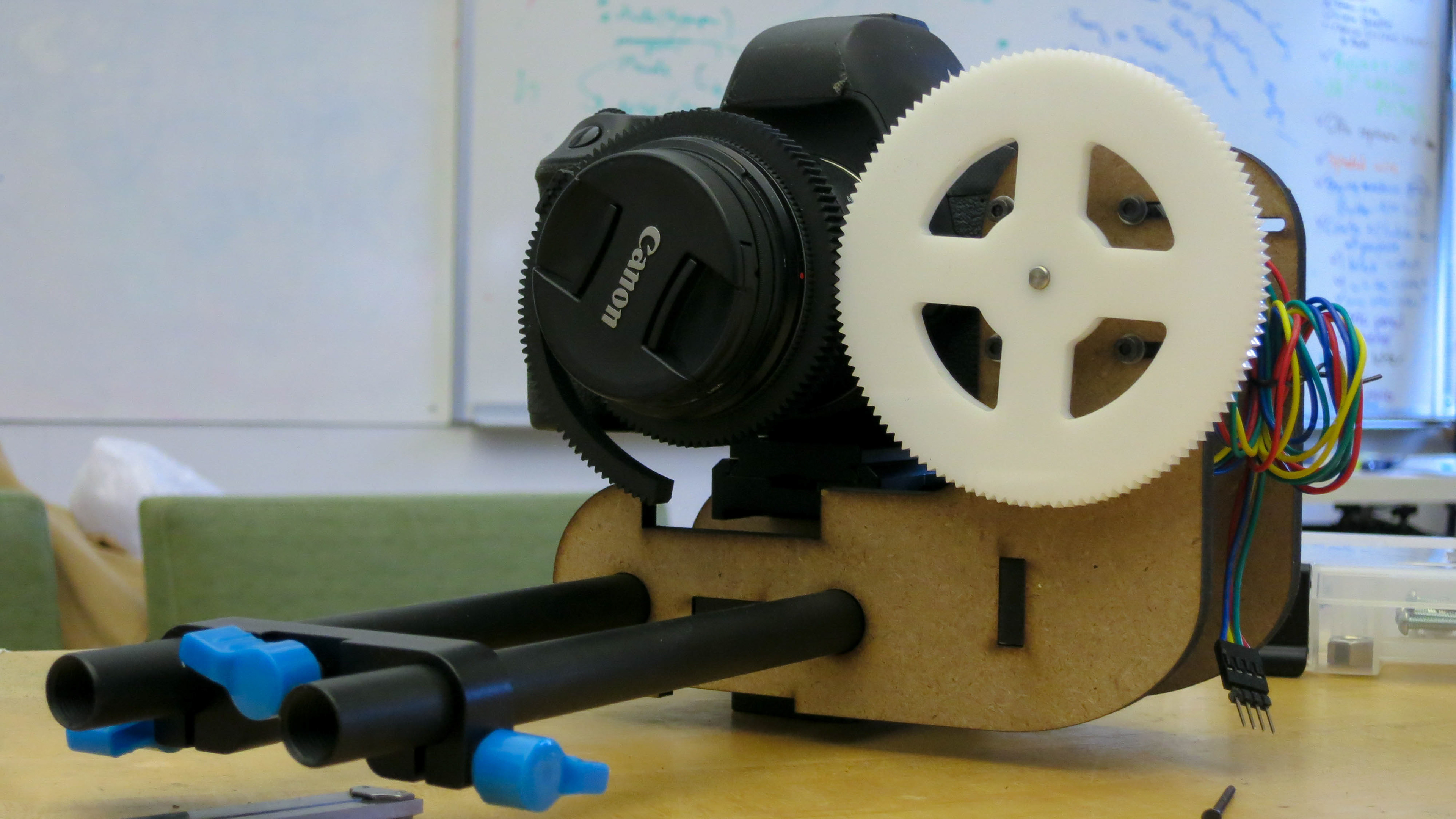
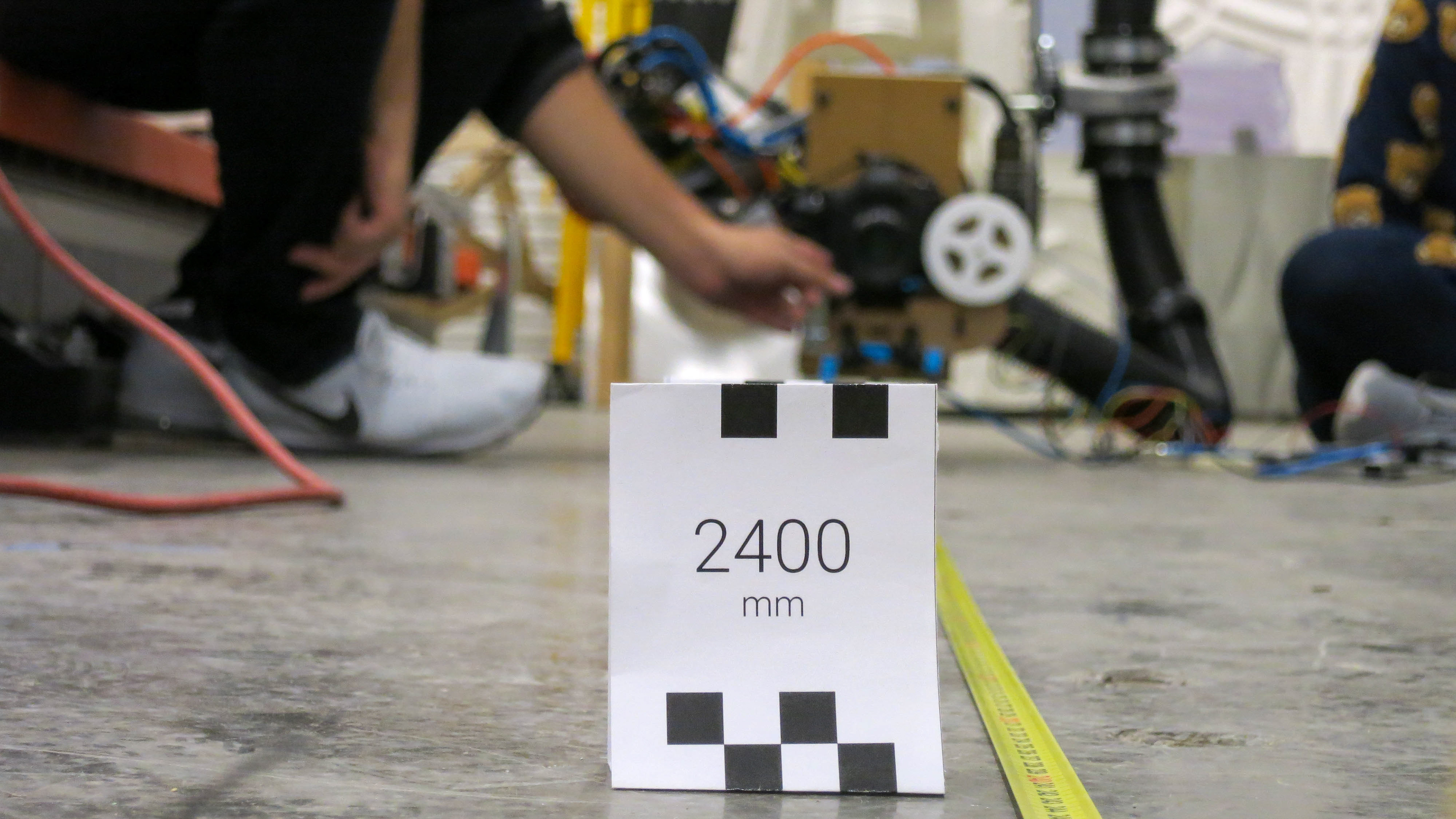
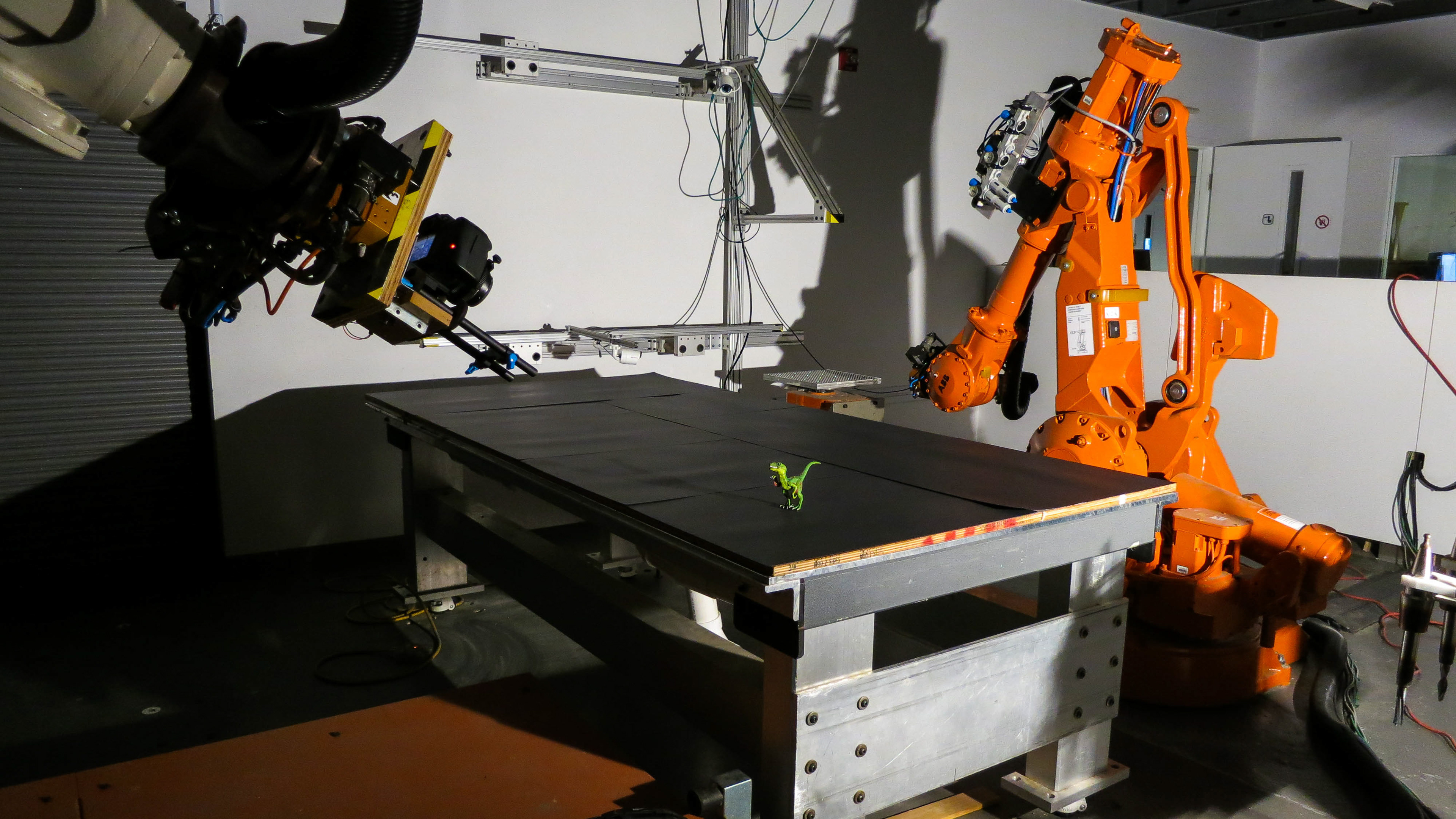
The "Rolling Robots" project is an exploration into the application of industrial robotics for media creation, focusing on DSLR video camera control and recording. It encompasses three development phases: end of arm tool design, robotic arm path programming, and data translation-calibration. The project features a tool integrating industry-standard components, a DSLR camera, and custom electronics on a plywood base. A unique aspect is the prototype of a stepper motor-driven follow-focus, offering enhanced control over traditional focus-pull mechanisms. The calibration phase's dataset, processed through regression analysis, informs the microcontroller and robotic arm programming for precise focus ring manipulation in correspondence with the arm's position. Collaborators: Scott Leinweber, Atefeh Mahdavi