
Çapunaman, Ö. B., Dong, W., & Gürsoy, B. (2022). A vision-based sensing framework for adaptive robotic tooling of indefinite surfaces. Construction Robotics, 6(3), 259–275. doi.org/10.1007/s41693-022-00081-4
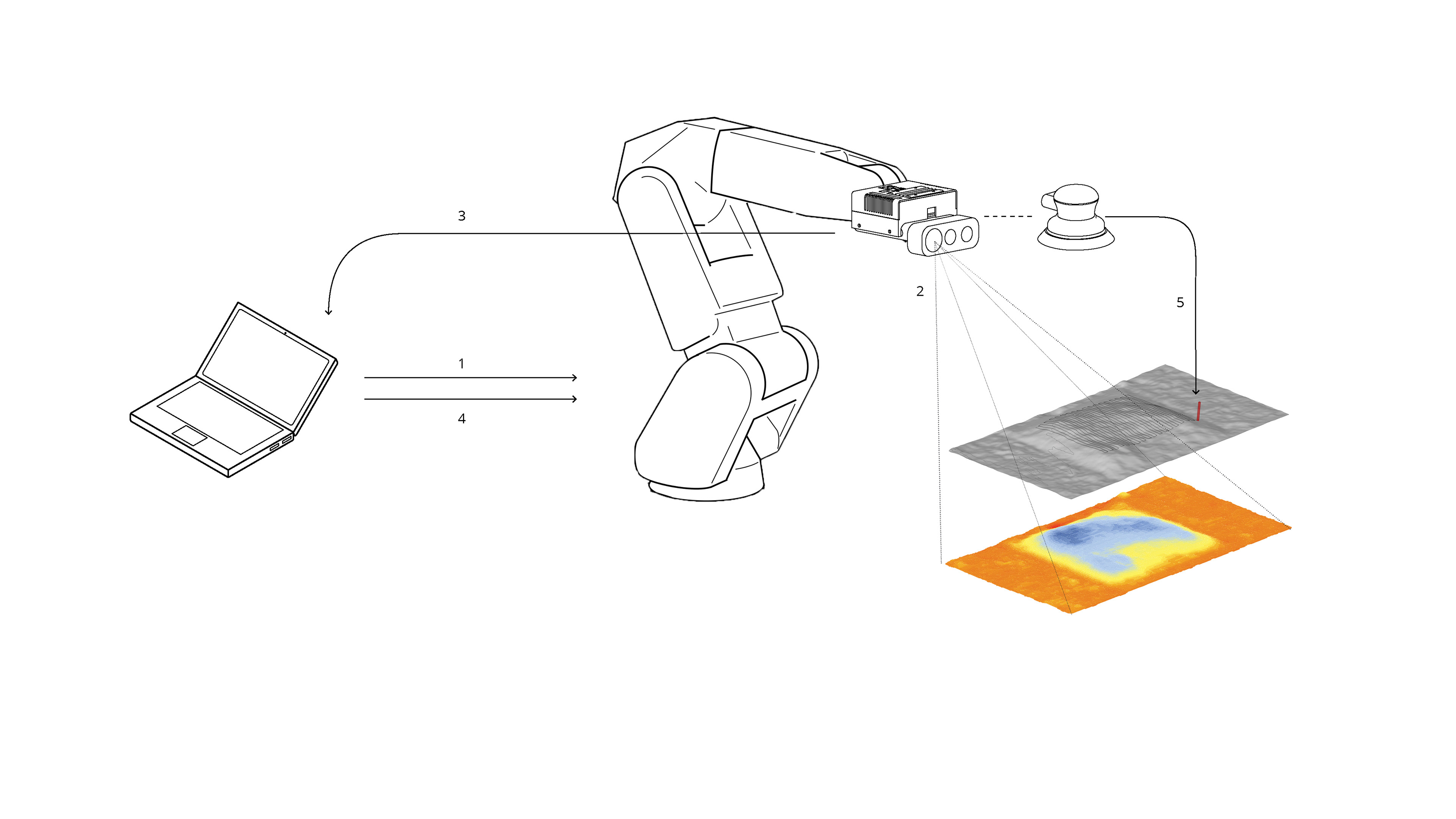
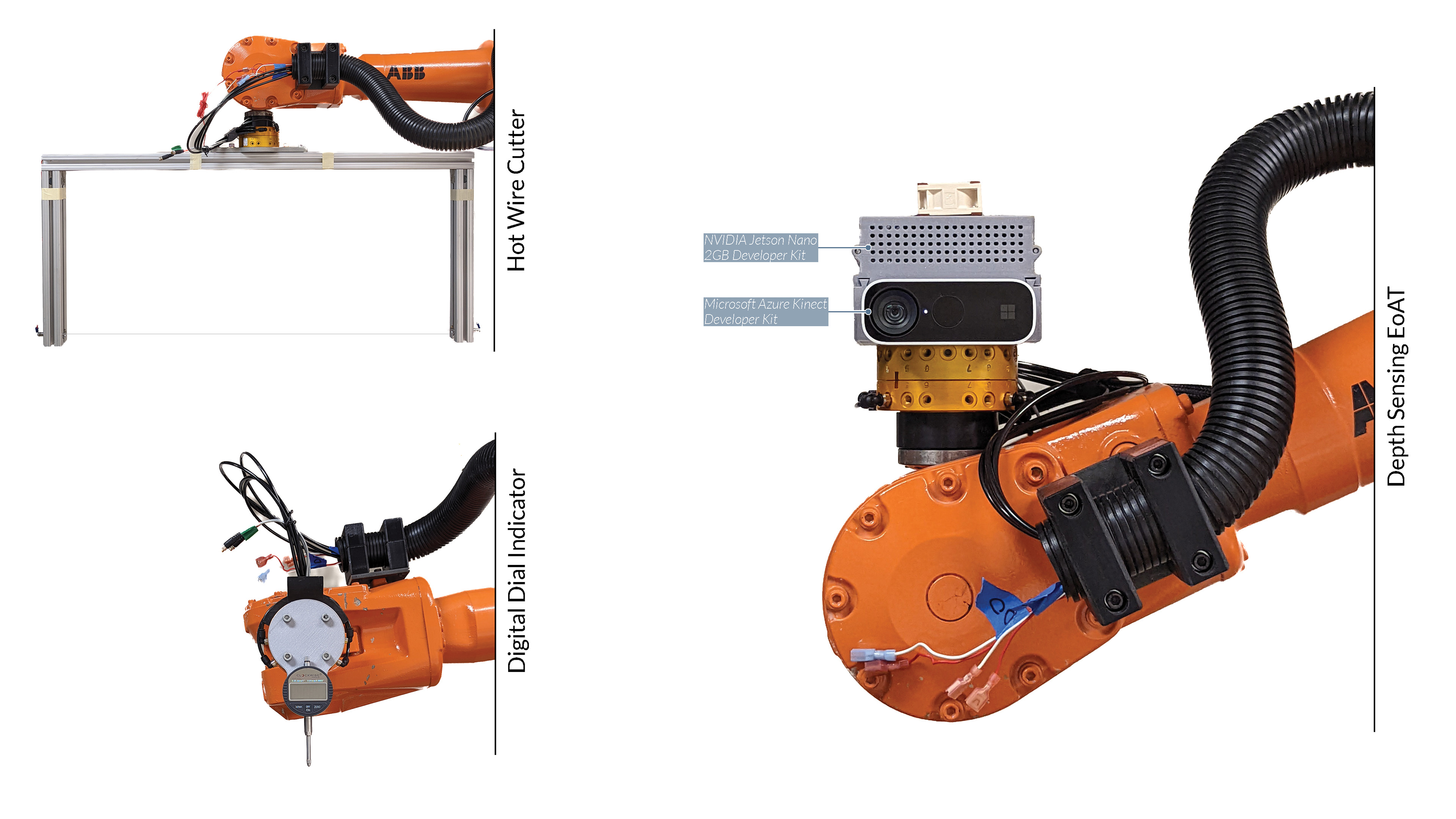
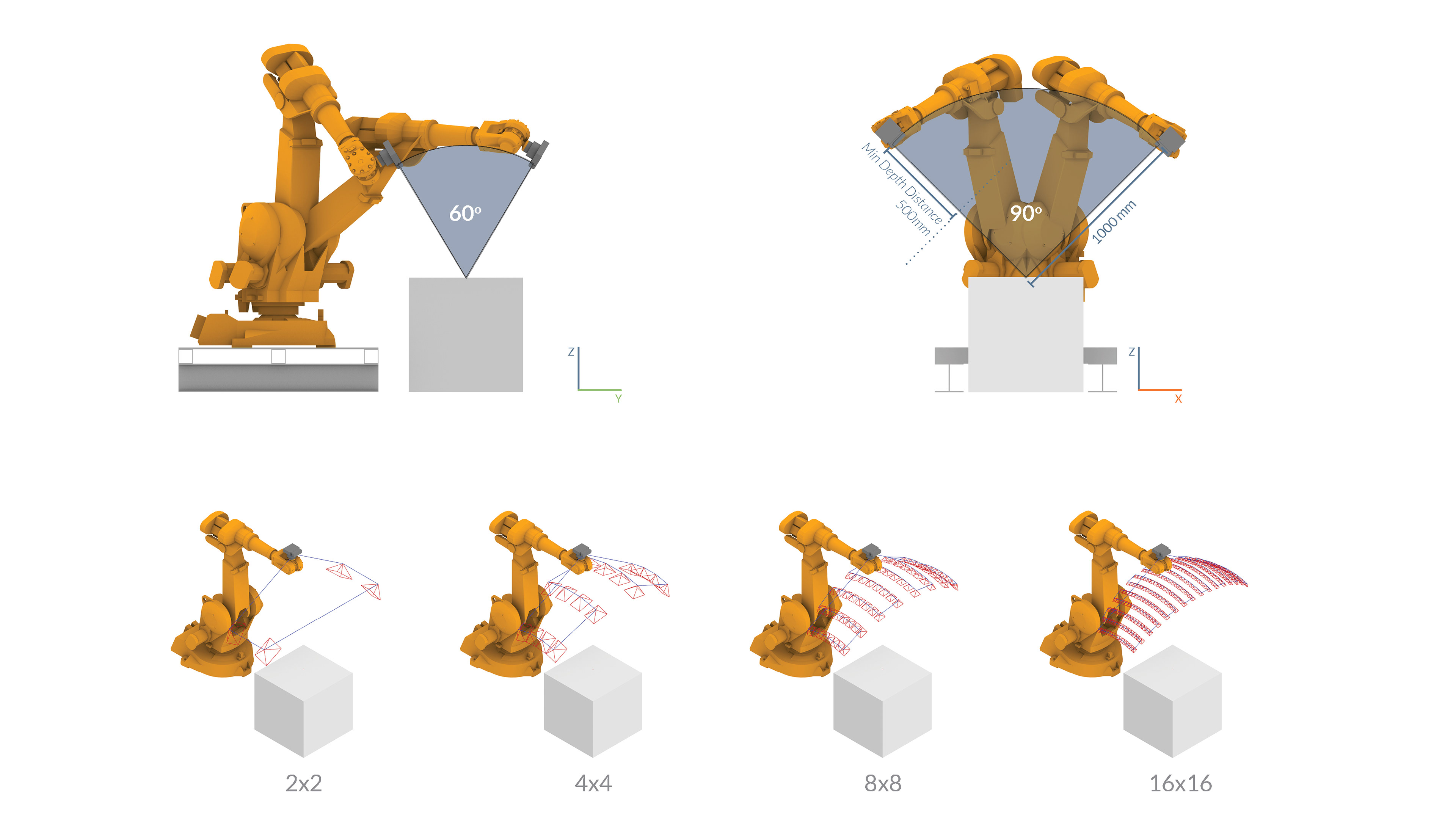
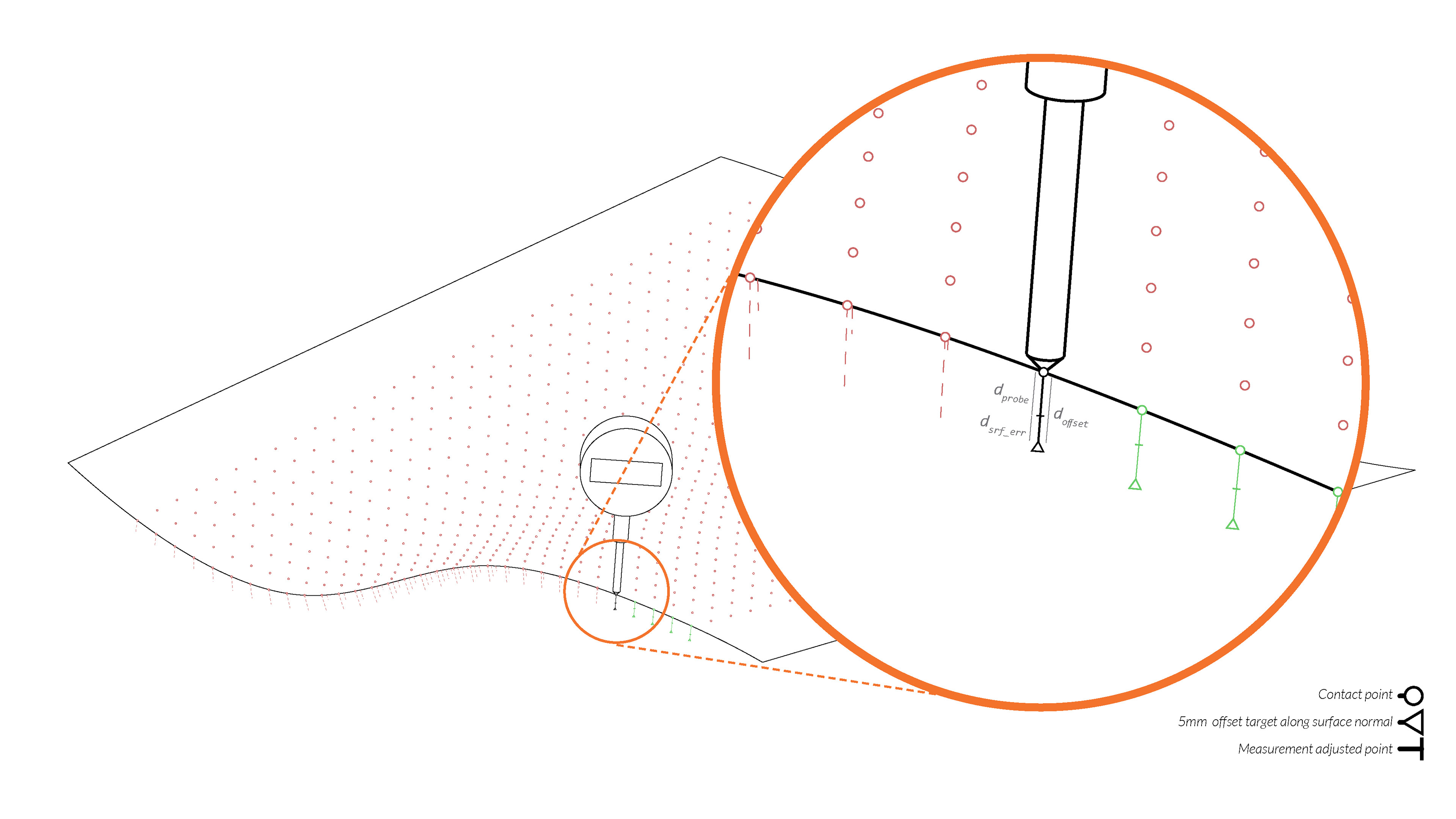
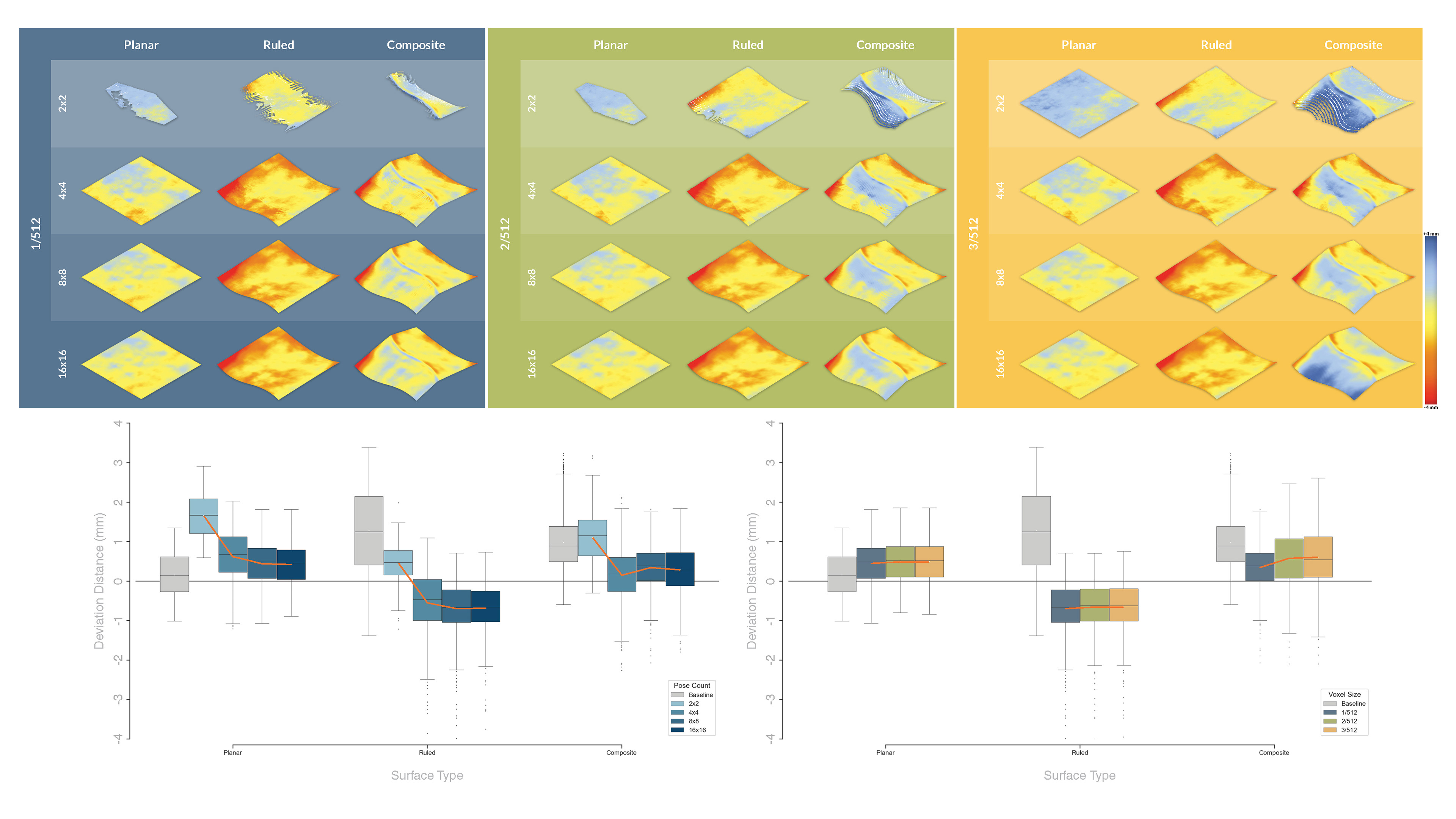
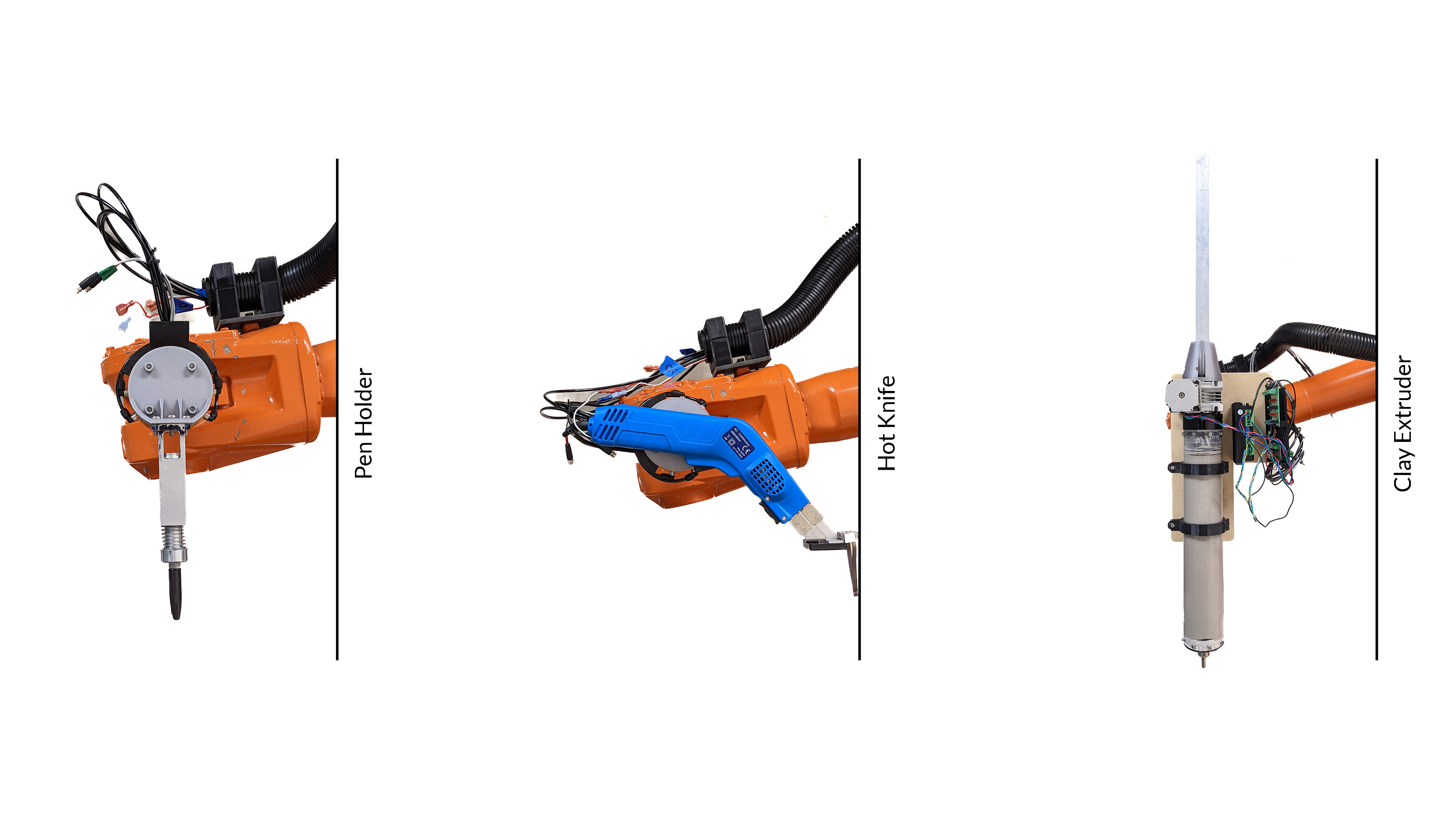
This study addresses the limitations of robotic arms in sensing and adapting to the environment during fabrication. It introduces a vision-based sensing framework to digitally reconstruct and register work environments, enabling tooling on indefinite surfaces. The paper validates the framework's hardware and software components, focusing on their accuracy, reliability, and efficiency in robotic fabrication. It examines the impact of surface geometry, camera pose, and reconstruction resolution on the process. Additionally, the framework's adaptability to various fabrication scenarios, including additive and subtractive operations, is demonstrated, offering a low-cost, scalable open-source foundation for future research in complex design-fabrication contexts. Collaborators: Wei Dong, Benay Gürsoy